【基于图模型的因果推断】5 图模型的Markov等价性和编程实践
我发现其实前几篇的符号是不甚严谨的,从此片开始,统一将图模型记作花体,节点集合和边集合记为和,而单个节点使用大写字母表示,如.
1 图模型和概率分布
通过上一篇的讨论,可见两个变量之间是否统计相关和所属图模型的结构是分不开的。接下来将对图模型结构和变量概率分布进行讨论。首先引入几个定义:
定义
假设图模型的节点变量集合为,概率分布中的变量集合为。中的所有节点与中的所有变量一一对应。对于中的所有非邻接节点子集(相应对应概率分布变量集合中的,分别简记为)
- 如果则称是概率分布的 独立图(Independency Map, I-Map)
- 如果 则称是概率分布的 依赖图(Dependency Map, D-Map)
- 如果上面两条均满足,则称是的 完美图(Perfect Map, P-map),也称与 同构(Isomorphic) 或 相互忠实(Faithful)。如果分布与某个DAG相互忠实,我们称该分布具有忠实性。
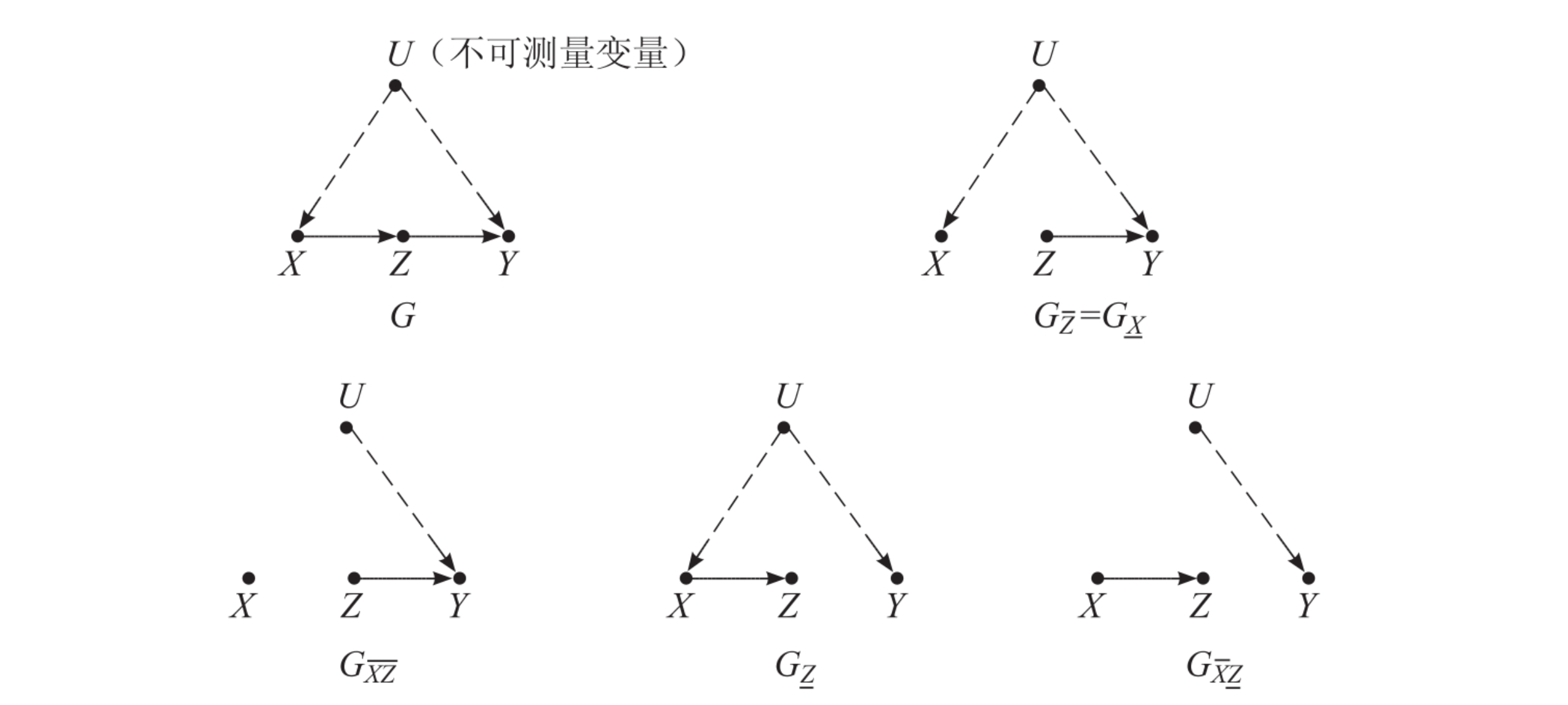
为了理解上述定义,现举分叉结构和链式结构为例,如下图所示:
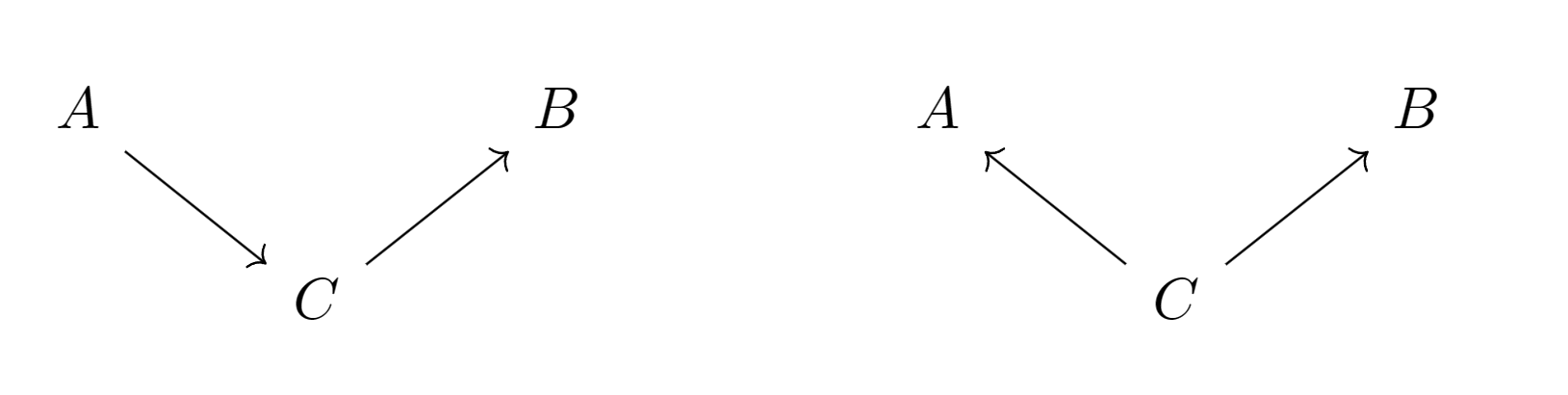
对于链式结构,有;对于分叉结构,有。注意,因此二者相等。像这样图结构不同,但联合概率分布相同的结构,称为是Markov等价(Markov Equivalent)的。
等价关系是一种特殊地关系。一个非空集合上的等价关系是的子集,具有下列性质:
- 自反性:,,
2.传递性:,,
3.对称性:,.
可以看到,集合上的一个这样的等价关系会将集合划分成若干等价类(Equivalent Class)。例如所有与元素等价的元素构成集合。
根据等价关系的性质,可以将图模型划分为若干等价类,它们常被表示为完全部分有向的无环图(Completed Partially Directed Acuclic Graph,CPDAG),相关研究发现,真正影响概率分布的边(有些边不影响概率分布,其朝向也就无关紧要了)至少在图模型中属于至少一个“V结构”(对撞结构)。因此在CPDAG中,只有V结构中的边或环(确定边,Compelled Edges)才具有方向。
定义(Markov毯,Markov Blanket)
对于图模型,针对其节点变量中的任意节点,满足条件的最小子集,称为节点的Markov毯。
定理
对于具有Markov性的有向无环图,其节点的Markov毯即为其父节点、子节点和与共子节点的其他节点的并集。例如在下图中,节点的Markov毯为:
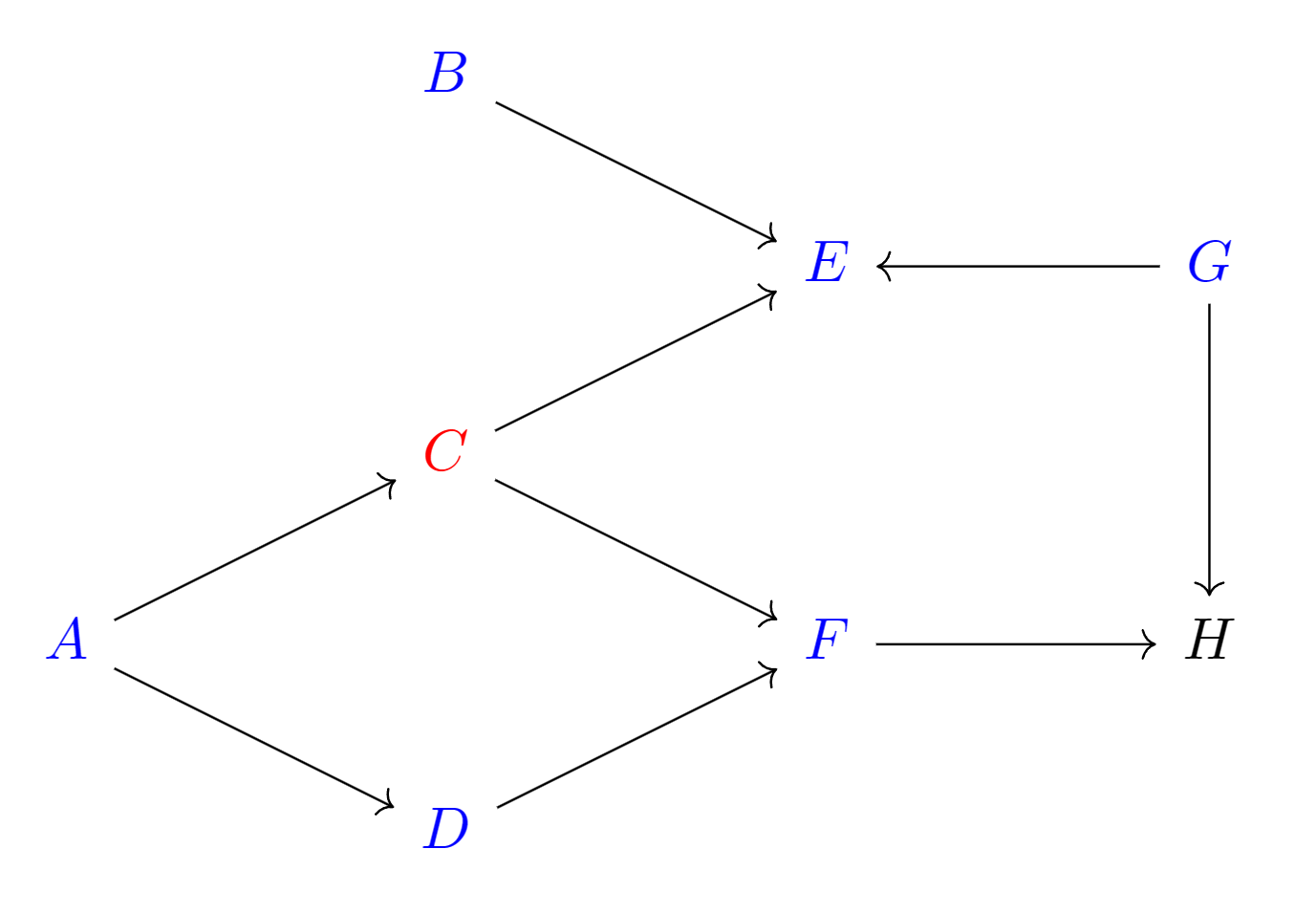
- 有向无环图的条件:
有向无环图中,是的任意子集,记为节点集合的所有父母节点组成的集合,为集合所有后代节点组成的集合。在给定的条件下,节点变量集合独立于中的所有非后代节点(不含父母节点),则称具有Markov性。- 因果模型对应的有向无环图满足Markov性。因为给定节点,固定其父节点后,满足Markov性(见前一篇)。
为了进一步介绍Markov等价,需要引入“框架”的概念。一个有向图的 框架(Skeleton) 就是将其有向边全部变成无向边得到的无向图:
定义(框架,Skeleton)
对于一个DAG,若将其边集进行拓展,得到,也即有向边的方向被抹去,就得到了这个图的框架,如下图所示:
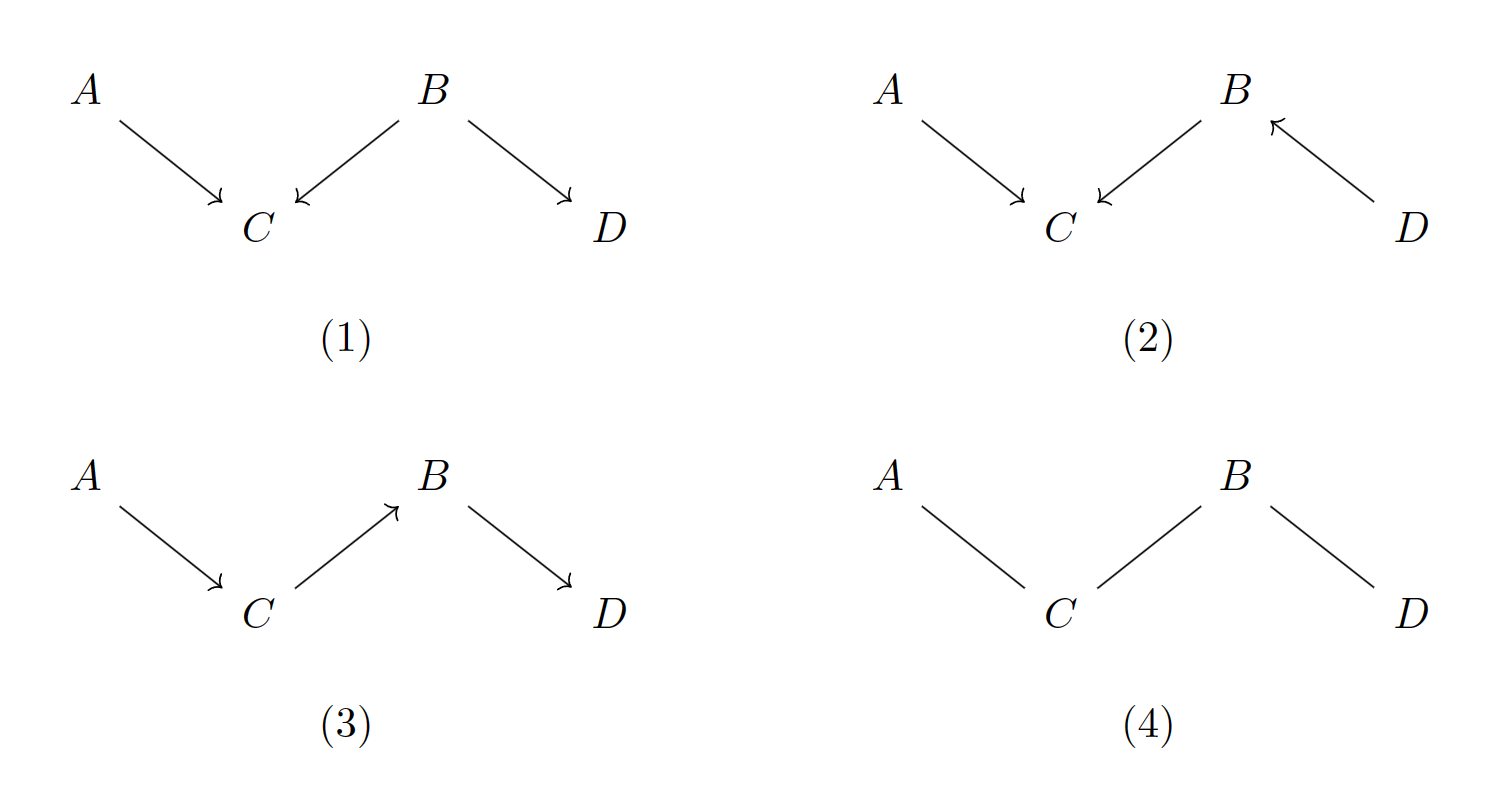
定理
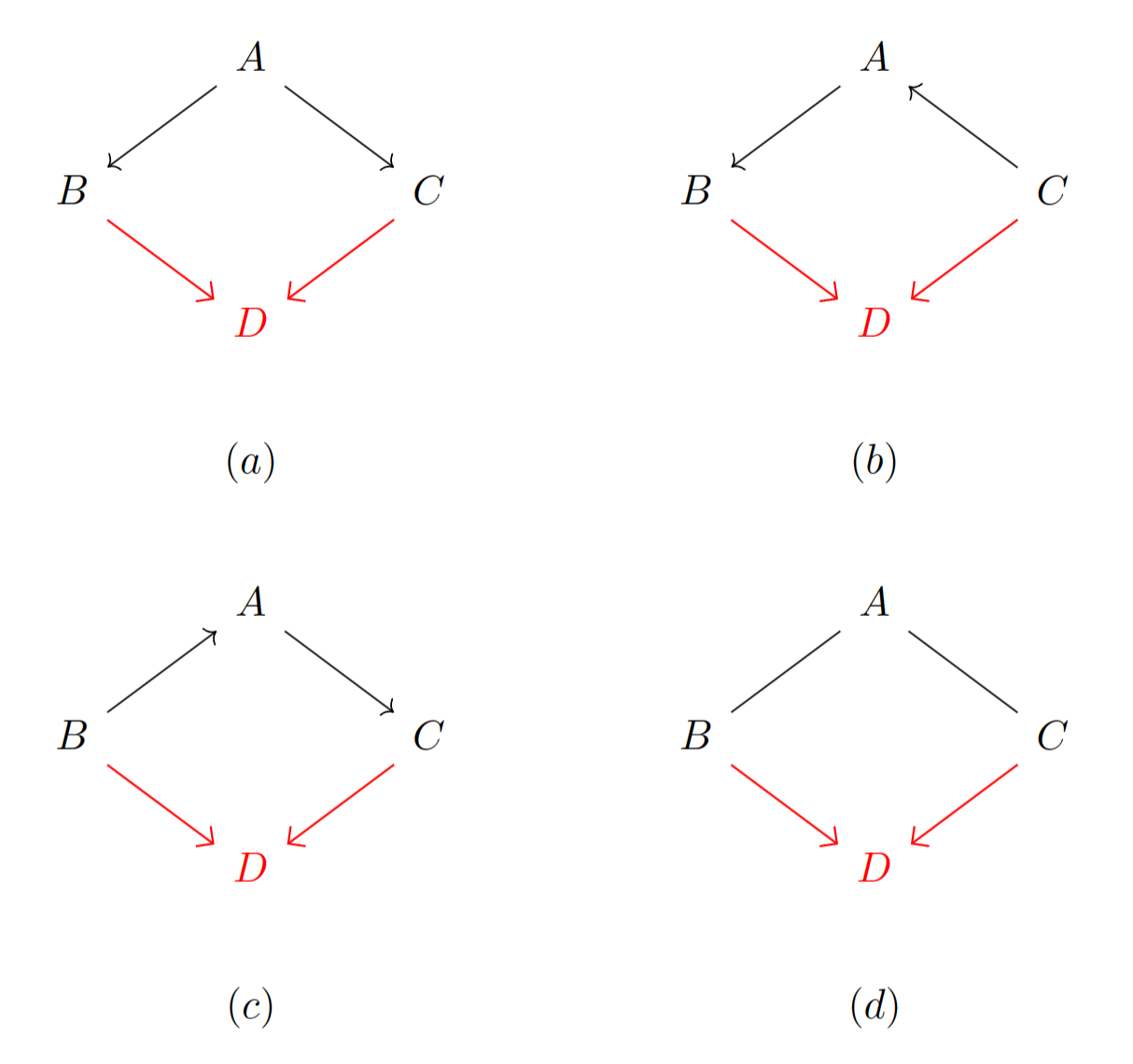
如果两个图模型的框架相同,且所有V结构相同(是否可以置换为所有对撞结构数量和位置都相同),则这两个图Markov等价。
为了更加直观的表示,请看下面几个例子:
2 图模型分析的编程实现
2.1 图模型分析的R实现
使用R中的DAGitty包构建下面的图模型:
> library('dagitty') |
> g2 <- dagitty("dag { |
> g3 <- dagitty("dag { |
下面介绍一些常用的函数:
1. 路径函数paths()
函数的签名如下:
paths(g, # 图模型 |
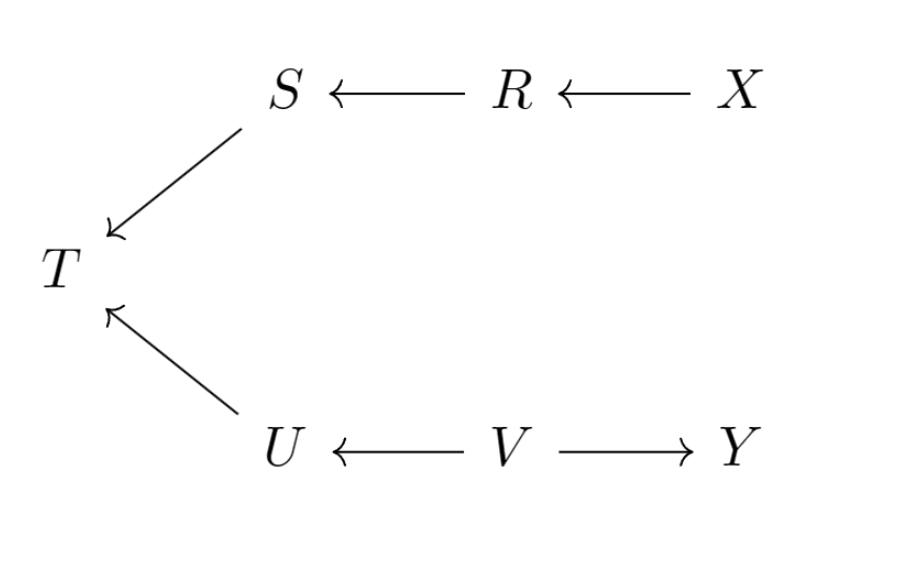
例如,在图模型中,考察在给定时从到有无联通路径:
paths(g1, "X", "Y", c("R", "V")) |
可见,在给定条件下,没有未被阻断的路径。进一步地,可以编写函数判断中的任意两个节点在给定时是否相互独立。
为了防止读者忘记,的结构如下:
pairs <- combn(c("X", "S", "T", "U", "Y"), 2) |
在上面的代码中,
combn()函数将参数中的元素凉凉组合,并赋值给数组pairsapply()函数将函数function(x)作用在pairs中的每个元素中if(!p$$open)判断该路径是否被阻断,如果两点之间有多条路径,则需要对此进行修改
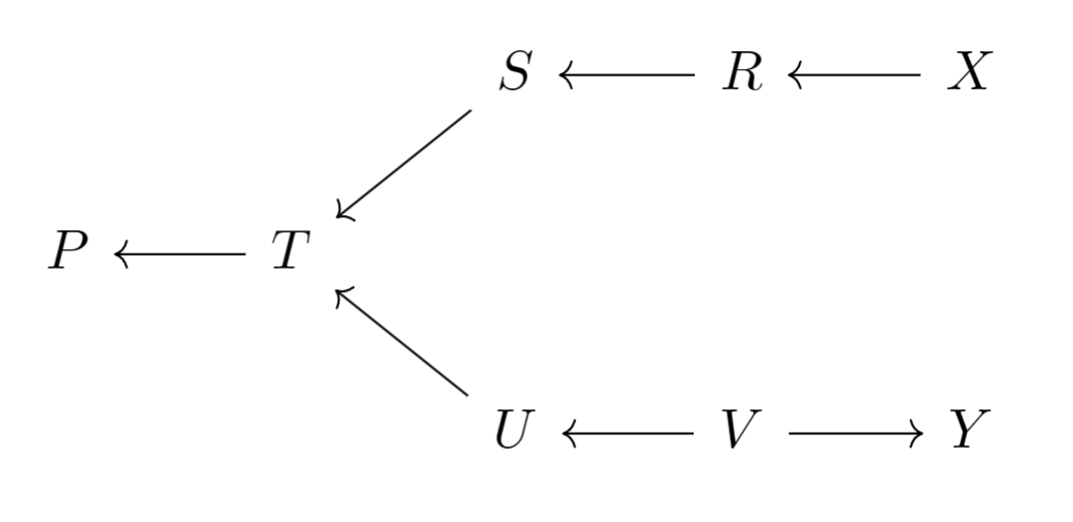
2. impliedConditionalIndependencies()
函数接受一个图为参数,输出图中所有节点的条件独立性关系:
impliedConditionalIndependencies(g3) |
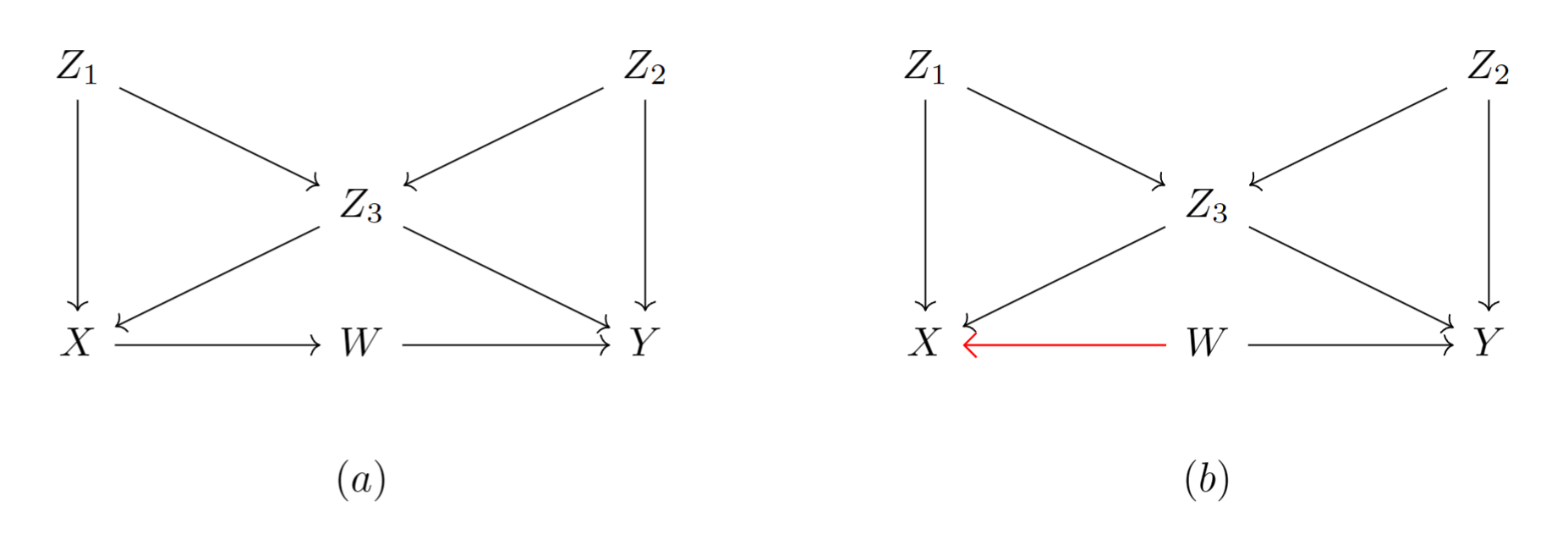
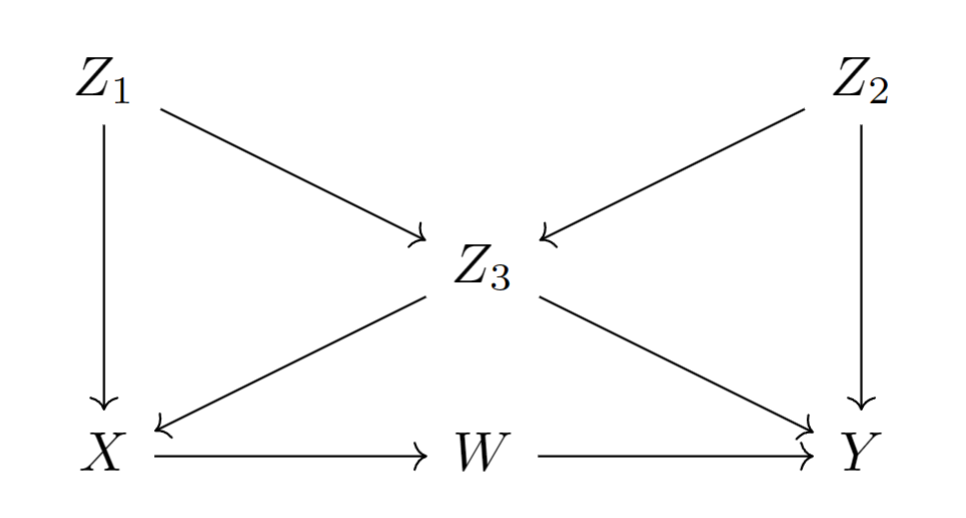
进一步地,可以对图模型设置可观测的节点。例如对设置可观测节点为(其他不可观察),然后求其中所有非相邻节点的独立性关系:
latents(g3) <- setdiff(names(g3), c("Z_3", "W", "X", "Z_1")) |
其中setdiff()函数求得图模型中除了给出参数以外的所有其他节点。
3. dseparated()和dconnected()
这两个函数求图中的两个节点集合和是否被节点集合所d-划分。它们的签名如下:
dseparated(g, X, Y, Z) |
- 当都不为空集时,返回bool值:是否将和d-划分或d-连通
- 当为空集时,返回值为在给定的条件下与d-连通或被d-划分的所有结点
回忆d-划分的定义,两个节点集合被第三个节点集合所d-划分,表示在给定第三个集合时,前两个集合中每个任取一个节点,它们之间的通路都被阻断。
4. markovBlancket()
函数的签名如下:
markovBlanket(g, v) |
其中g为输入的图模型,v为节点,类型为字符串。函数接收这两个参数,输出的Markov毯的所有节点。
5. equivalenceClass()和equivalentDAGs()
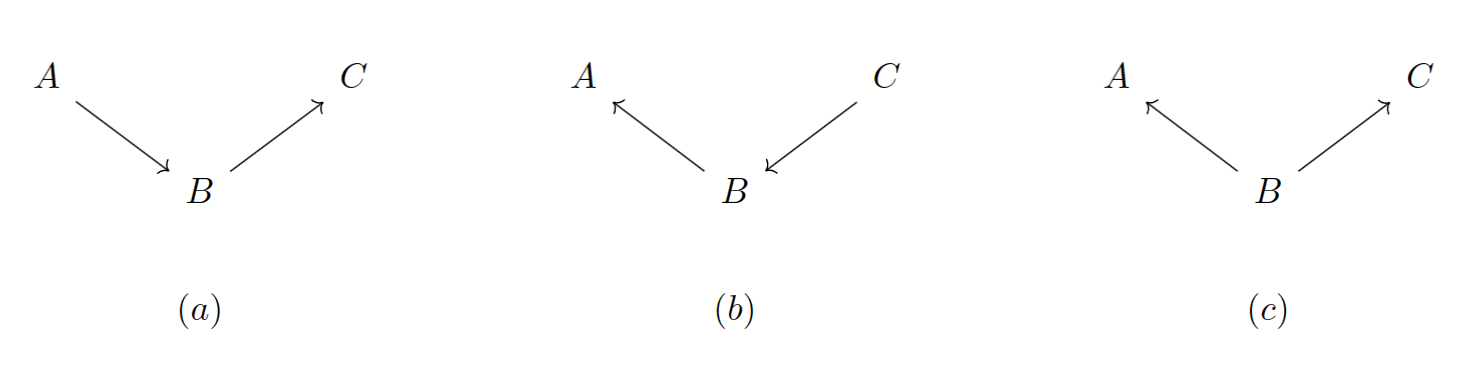
两个函数都接受一个参数,即图模型,前者输出这个图对应的等价类,后者输出等价类中所有和输入的图模型等价的图模型,例如
equivalenceClass(g3) |
这里需要稍微动动脑筋。假设将这条有向边倒转,则形成了对撞结构(如下图所示),因此该图模型的等价类就是它自己构成的集合。